Projects
This list showcases some of the selected research, course and independent projects I have worked on during my career.

Nov 2021 - Present
Research Project
The goal of this project is to rapidly map, navigate, and search environments using a fleet of heterogenous robots. The fleet consists on fast moving RC cars and the Spot quadrupedal robot.
Read More Videos
Nov 2022
Course Project
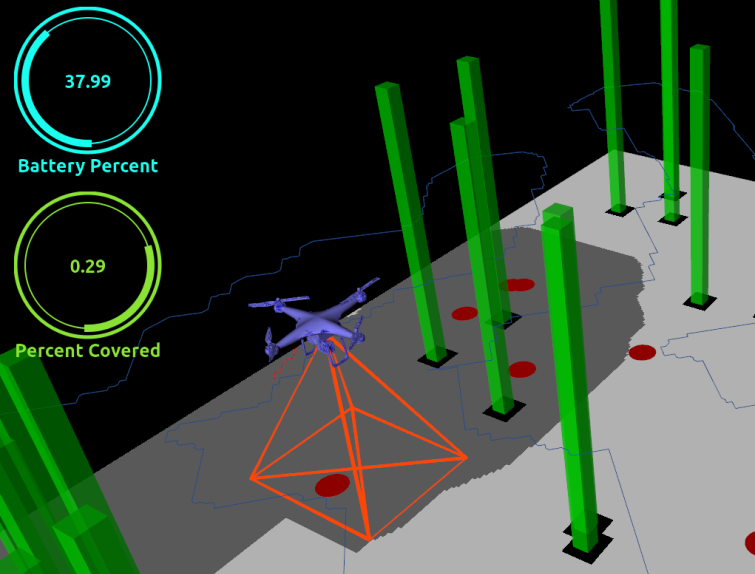
In this work, we developed and implemented a planning strategy for UAVs to plan an emergency landing on one of landing zones in an environment which will maximize coverage within battery life constraints.
Read More Video
Jan 2019 - Dec 2019
Research Project
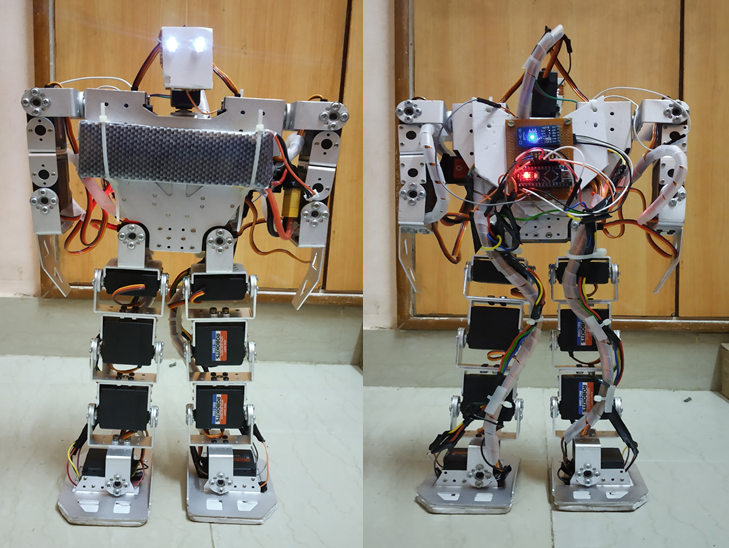
A 17 DOF Humanoid Robot created as part of the undergraduate Project as a research platform to test different algorithms for humanoid robot. The robot is capable of simple actions like walking and turning. New gaits can be generated using matlab trajectory sequences and the inverse kinematic function. The robot can be controlled serially using an bluetooth device.
Read More Video

May 2017 - Jul 2018
Research Project
A mobile robot inspired by the TurtleBot to perform and develop SLAM Algorithms. It uses a XBOX Kinect Camera to sense environments and uses an Intel Celeron based NUC commputer as its brain. The robot can map and autonomously navigate between two points in an environment
Read More Video

2014
Independent Project
This was one of my first robots which I built in 2014 after getting inspired by the Pixar Robot Wall-e to conduct trivial tasks like sweeping the floor. It is remotely controlled using a Playstation Controller. As the cleaning mechanism uses a physical brush, it consumes less power than vaccumm robots.
Read More Video
