
Explodroid - SLAM Robot
May 2017 - Jul 2018 Research Project
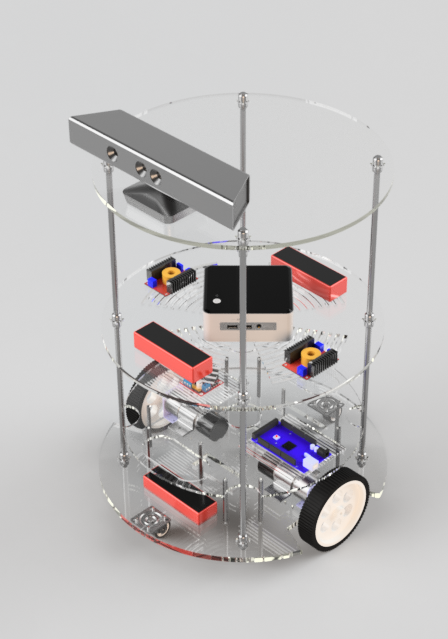
This robot was built as part of the research work conducted in Microsoft Innovation Lab as interns. The robot was inspired by the TurtleBot, mainly to serve as an cost-effective substitute. The robot runs on Robot Operating System(ROS) and is equipped with different sensors.

- The robot uses a xbox Kinect RGB-D camera to sense the environment.
- The robot using differential drive mechanism to move around. The motors are equipped with encoders to provide postion feedback.
- The robot uses an Intel NUC as the on board computer which runs ROS and performs SLAM
- The Kinect camera provides point cloud data which is converted to laserscan data which is then used by the gmapping algorithm as input for SLAM
- Performed autonomous navigation to a target point on the map using Adaptive Monte Carlo Localization
You can find the ROS packages and the dxf files for the chasis on github. This project was featured in an article written by EdexLive
The team consisted of three interns including me, Manoj Surya K and Tarun Sriram